Aerotech针对光纤对准应用设计了精密运动平台,例如FiberMax,它是提升现代光纤和硅光对准效率的关键部件。然而高精度的平台仅仅是整个光纤对准系统的一部分。提高对准运动效率的控制软件具有和硬件同样的重要性,更高的对准效率意味着更好的产品质量和更高的产能。
Aerotech的A3200软件集成了六种硅光搜索算法供用户选择,针对不同的应用模型和系统,客户可以选择相对应的算法。他们分别是HillClimb,SpiralRough,SpiralFine,FastAlign,GeoCenter和Centroid。如图1所示,打开A3200里面的Configurationmanager/Task/Fiber可以找到:
图1Aerotech的六种光纤算法
按照硅光对准系统的轴数来分,可以分为单轴对准,双轴,三轴以及三到六轴对准算法。
按照搜索算法的功能,可分为初始光搜索算法和峰值搜索算法。其中SpiralRough属于螺旋式搜索算法,它一般用于找到初始光,SpiralFine和SpiralRough算法比较类似,不过它既是初始光搜索算法又属于峰值算法。GeoCenter和Centroid分别是两轴和三轴的峰值搜光算法,而FastAlign适用于两轴到六轴的峰值算法。
当应用场景不同和或者硅光能量分布特点不同时,可以选择相对应的搜光算法,比如图2所示,当光能量近似于平板分布时,最大值可能是某一个区域而不是某一个位置,用户最关心的是进入到最大值区间的中心,并不注重最大值的某个点,这时候GEOCenter也许是一种很好的搜索方式,它可以由用户指定在某一区域进行“弓”字形扫描或者进行“田”字形扫描,同时可以限定扫描的横向及纵向扫描区间及每一步的距离,扫描结束后会停在整个光能量的几何中心位置。在实际应用中光能量是高斯分布更为常见,这时FastAlign也许就会比其它算法更快找到峰值。FastAlignment属于一种迭代算法,它可以定义参与搜索轴的数量,第一步的搜索方向和步距,迭代搜索次数,饱和阈值,误差范围,轴的搜素限位等参数,它适用于能量为高斯分布的特征,搜光轴通过每次运动后获取的能量与前值比较,找到光能量逐步变大的方向,搜索到设定值,或者到搜索次数完成后停止。

图2不同类型的能量分布
做一个典型的实例演示,当光斑能量为高斯分布,搜光系统从完全没有光能量的位置搜索到最大值,可以选择Aerotech的组合搜光算法,即先用SpiralRough找到初始光,再在这个基础上运行FastAlign搜索峰值位置。
SpiralRough找到初始光,程序如下:
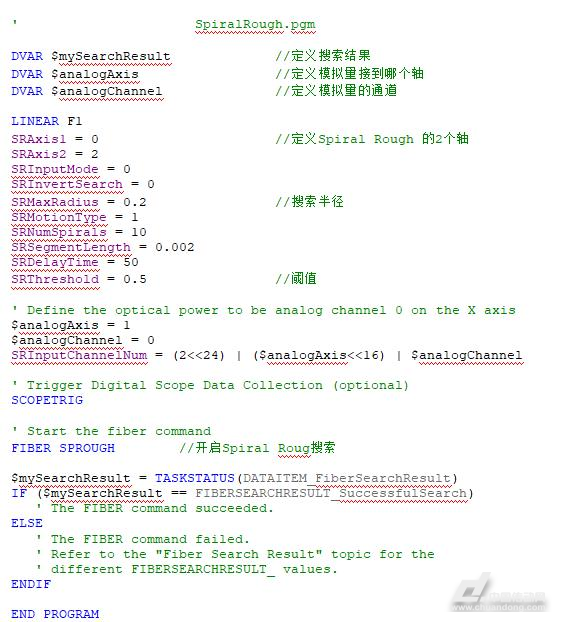
图3展示了SpiralRough的2D运动轨迹,这种算法又称之为螺旋搜光算法,能帮助用户快速准确地找到初始光。

图3SpiralRough的2D运动轨迹
图4将轨迹切换回1D图形,我们可以看到整个过程耗时3.2秒,光能量从0V到1.1V,非常的快捷高效的完成了初始光搜索,为后面的峰值搜索打下了坚实基础。
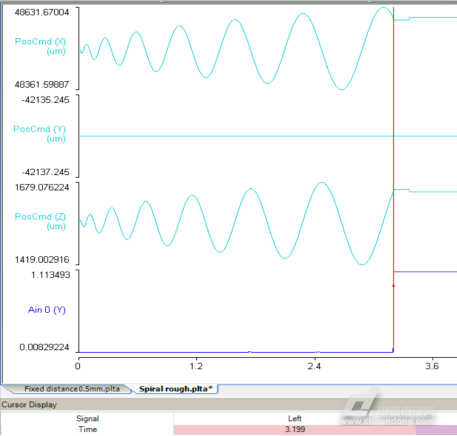
图4SpiralRough的1D运动轨迹
FastAlign找峰值光,程序如下:
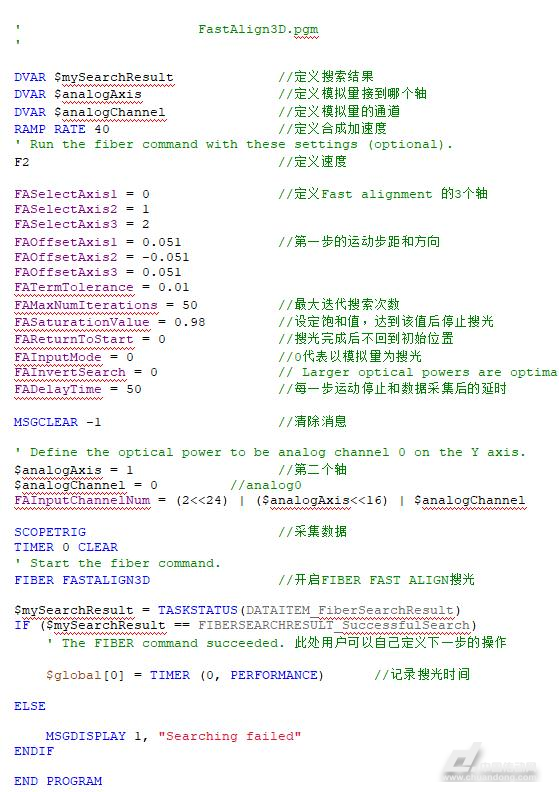
从图5所示,FastAlign算法开启后XYZ三个轴同时按程序设定运动第一步,在初始搜索的基础上,随后每一步的运动都会与前一步进行能量比较,确保搜光系统往山峰的方向高效搜索,光从初始能量的0.26V搜到1.1V,整个峰值搜索过程大约5秒左右完成。

图5FastAlign的1D运动轨迹
用户完成峰值搜光算法后好可以调用Aerotech的其它算法在小范围内进行再多一次的扫描,检验是否搜索结果为峰值。